

随着汽车“四化”变革的不断深入,“移动智能终端”将是未来汽车的终极发展形态。智能汽车也将使出行、办公、本地服务以及娱乐等需求充分释放,用户体验将成为未来汽车消费的决定性因素。

整车同质化日益明显,而软件恰恰在汽车开发中所占的比例越来越高,这也是未来不同汽车产品打造差异化的主流方向。因此,无论是传统主机厂还是新兴的造车企业,都不遗余力地进行智能网联的研发。奇点汽车也通过软硬件一体化的设计理念打造了奇点的“数字化座舱”。
“CAN+以太网”双主干网架构 实现快速迭代升级
驾乘体验的改变,其实来自于车内空间被重新定义。在传统汽车上,或许见的更多的是分离式的结构,例如中控娱乐信息与ADAS其实更大程度上是分离存在的。
而在“移动智能终端”的时代,这种分离式的结构也将向一体化数字座舱发展,同时也带来了软硬件架构的改变,数字座舱的体系架构正在向多个域的方向演变。同时也对高带宽的车载网络提出了更高的要求,传统的CAN总线已经满足不了日益增加的新需求。
基于这样的考虑,奇点汽车首先提出了“软硬一体”的智能系统开发理念,同时做了两大创新,首先是将整车结构划分为5个控制域,分别是车身域、智能信息域、底盘域、智能驾驶域和动力域;其次,奇点以CAN+以太网的双主干网架构作为新型车载总线的解决方案。

这样的架构设计所带来的好处在于,车载以太网能够提供100Mbit/s以上的传输速率,保证了各个控制域之间的高速信息互通。
奇点汽车智能系统硬件总监蒋伟宏表示,“独立域可以作为一个域控制器节点,加入到整个以太网的双架构上来。在独立域上可完成域的组成与分析,对于总线来说,就有大量的数据在整车上运转。不管是这一代还是下一代汽车上面都会有各种各样的数据量输入进来,支撑智能化的变革。”
按照奇点汽车智能系统开发者的思路,数据在整车上的运行流通可以帮助他们在软件上做更多的优化。可以通过OTA升级的方式,更加快速地迭代新的功能和服务。以此希望实现“软件定义硬件”。
据奇点方面介绍,在开发智能系统过程中,从架构上也做了很多模块化、分层化的事情其目的是还是为了能够满足用户2~3年的需求,进行快速的迭代。
鲁棒性是智能汽车时代最为关键之所在。在安全性能方面,奇点智能系统在硬件层面,除了车机外零部件都采用了是车规级。操作系统的是在安卓系统上做了优化和加固,也通过大量时长的测试,保证不死机、不崩溃。同时,第三方应用程序只能通过奇点的测试才被允许预装到奇点汽车的智能系统中。

有了can+以太网的双主干,以及五个控制域的划分的系统底层架构,在上层的人机交互智能体验层面,最大的特点的是“三屏联动”。
“三屏”是指,16.4全尺寸HUD抬头显示+15.6英寸可旋转中控屏+12.3英寸全液晶数字仪表盘。

三屏也实现了将车辆信息的分屏显示,中控屏呈现了地图信息,仪表盘则能显示更细致的行驶路线,而HUD则能显示导航信息,能够实现三屏信息实时联动。
软硬自研 智能驾驶满足ISO26262规范
据此前奇点汽车对媒体发布的消息,旗下首款量产车型奇点is6在智能驾驶方面已经实现了自适应巡航、车道保持、紧急制动、自动泊车、疲劳预警、停车距离控制、开门预警等12项驾驶辅助功能。可以看出,目前奇点汽车is6的智能驾驶处在L2级水平。
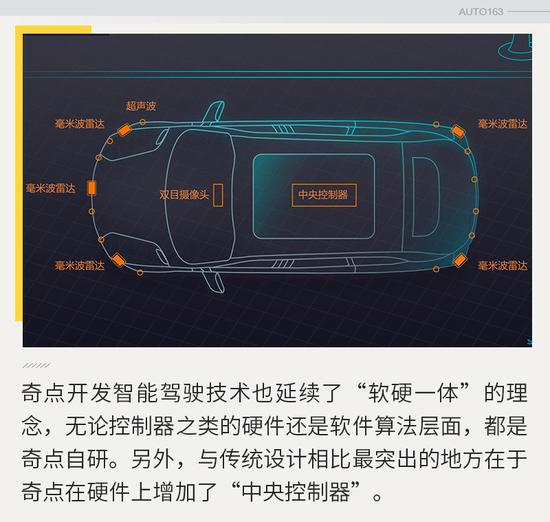
在硬件配置上,奇点智能驾驶系统除了车载计算平台外,还包括5个毫米波雷达、12个超声波雷达、1个双目摄像头,同时预留了1个激光雷达的装载位置。
奇点在开发智能驾驶技术上也延续了“软硬一体”这样的理念,无论控制器之类的硬件还是软件算法层面,都是奇点自研。另外,与传统设计中没有明显区别的地方在于传感器的布置没有太大差异,而最突出的地方在于奇点在硬件上增加了“中央控制器”。
奇点汽车ADAS及软件平台高级总监刘瑞祥表示,在智能驾驶技术上要具备“基于场景化的可成长性”。
刘瑞祥所说的“可成长性”就是指,相比较于传统智能驾驶系统各个零部件间分离式的设计而言,奇点汽车的智能驾驶系统,最大的区别在于所有数据将汇聚于中央控制器,由中央控制器做决策规划、数据处理,从而实现各种智能驾驶的功能。所有的数据掌握在自己手中,从而保证了系统具备可以快速迭代升级的可成长基础。
而场景化的设计,则是指在“不同场景里面可以做自由组合,甚至在不同场景下有不同的策略。”在现实场景中,通过不同功能的组合,解决用户真正的痛点,成为最频繁使用的功能。
刘瑞祥对此举例,“例如,我们在国内开车,某些时候如果两边有违章停车,或者是自行车道,这样情况下中间过车会很难开。那我们可以基于超声波雷达与环视摄影头,辅助司机来过通过这个场景。比如说是狭窄道路,可以在仪表上自动展开摄像头,很清晰的看到离路两边的距离有多远,能不能过,能不能控制。类似于这样的场景,在后续会逐渐的迭代来进行优化。”
因此,可以看出,奇点从中央控制器硬件、到软件、算法自研的目的就是为了规避传统设计所带来的“分离”,将“软”、“硬”掌握在自己手中,为迭代升级提前布局。
那么自行设计研发的硬件达到了什么样的水平呢?
在汽车产业中,都以ASIL(汽车安全完整性等级)作为检验功能模块中片上系统半导体安全等级的重要指标。ASIL也是ISO 26262标准中的重要评价体系,分为A、B、C、D四个等级,D级最高,意味着安全性要求越高,为实现安全付出的代价越高。
从奇点汽车方面获取到的消息,智能驾驶系统已经满足了ISO26262的标准要求,系统中的数据处理芯片达到了ASIL-B,控制算法的芯片则按照最高等级ASIL-D的标准来进行设计。
对于更高阶自动驾驶技术的规划,奇点汽车将于2019年底到2020年初完成对L3级自动驾驶技术的开发。
来源:网易汽车